Description
The Pose sensor is a fully open source device for real time 2D/3D positioning and orientation (North-East-Down quaternion).
It is a low-compute and low-power solution for absolute positioning and orientation.
It is meant to used as tag but it is also possible to use it as basestation. We recommend the STM32 standalone version for basestations due to the cost of having a Raspberry Pi per base station.
The Raspberry Pi HAT pose sensor uses pins 13-28 on the 40-pin header.
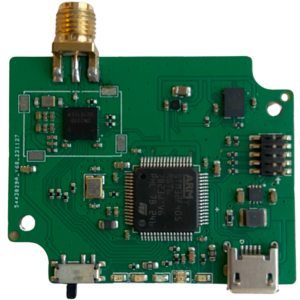
The driver code runs on the Raspberry Pi. It has the following sensors:
- Qorvo DW3220 UWB with RP-SMA female connector.
- Bosch BMI088 IMU with triaxial accelerometer and triaxial gyroscope. The BMI088 is a high-performance IMU used in harsh environments such as those in drones and robotics applications. It has a high vibration robustness and temperature stability.
- Bosch BMM350 triaxial magnetometer with high accuracy and ultra-low noise.
Contact us if you are interested in getting the HAT working on NVIDIA Jetson or other edge computers with a Raspberry Pi 40 pin header.