– Fully open source positioning and orientation system based on UWB.
– Ultra-wideband (UWB) sensor for real time positioning in 3D (x,y,z)
– IMU and magnetometer for orientation (quaternion)
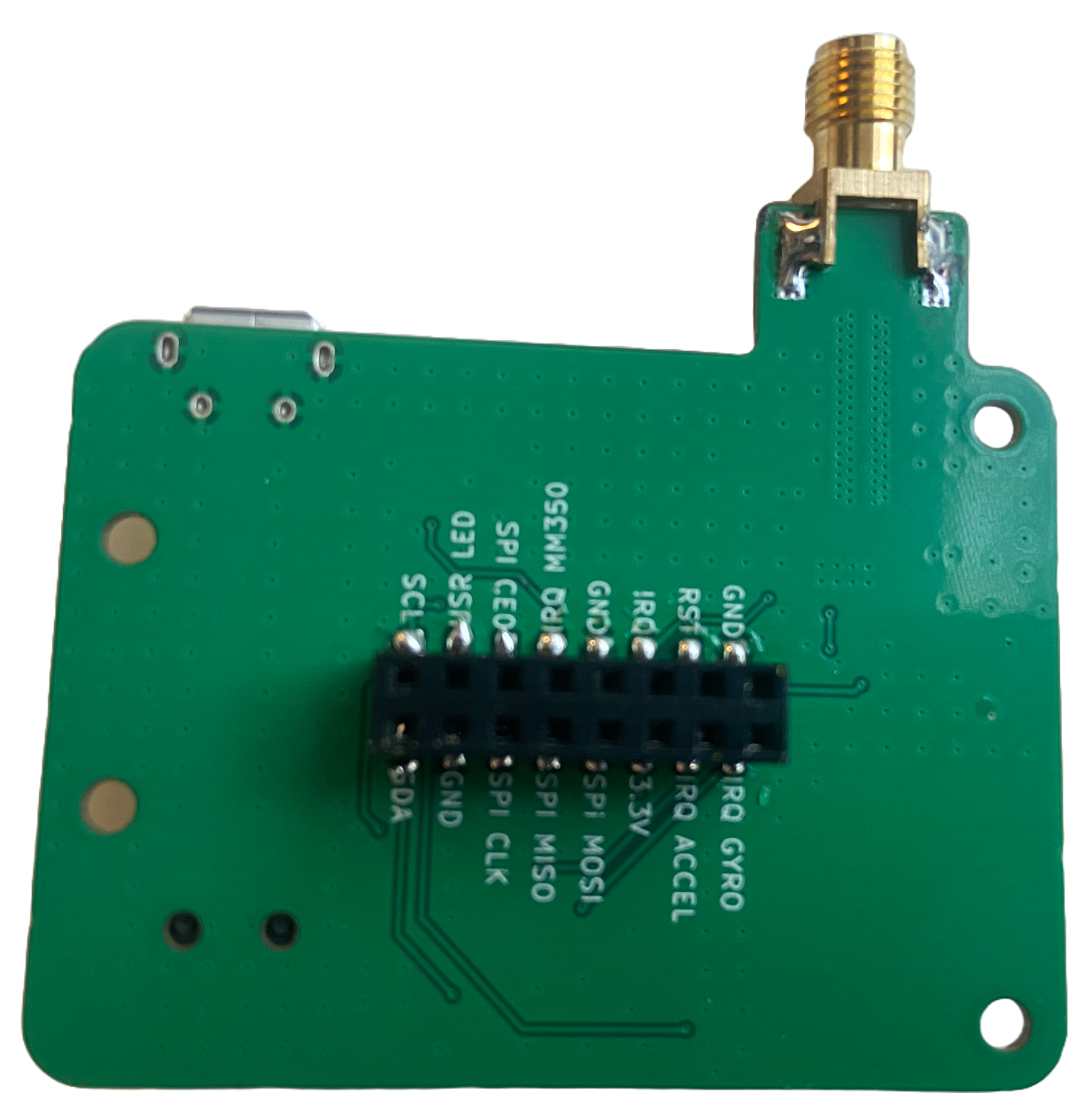
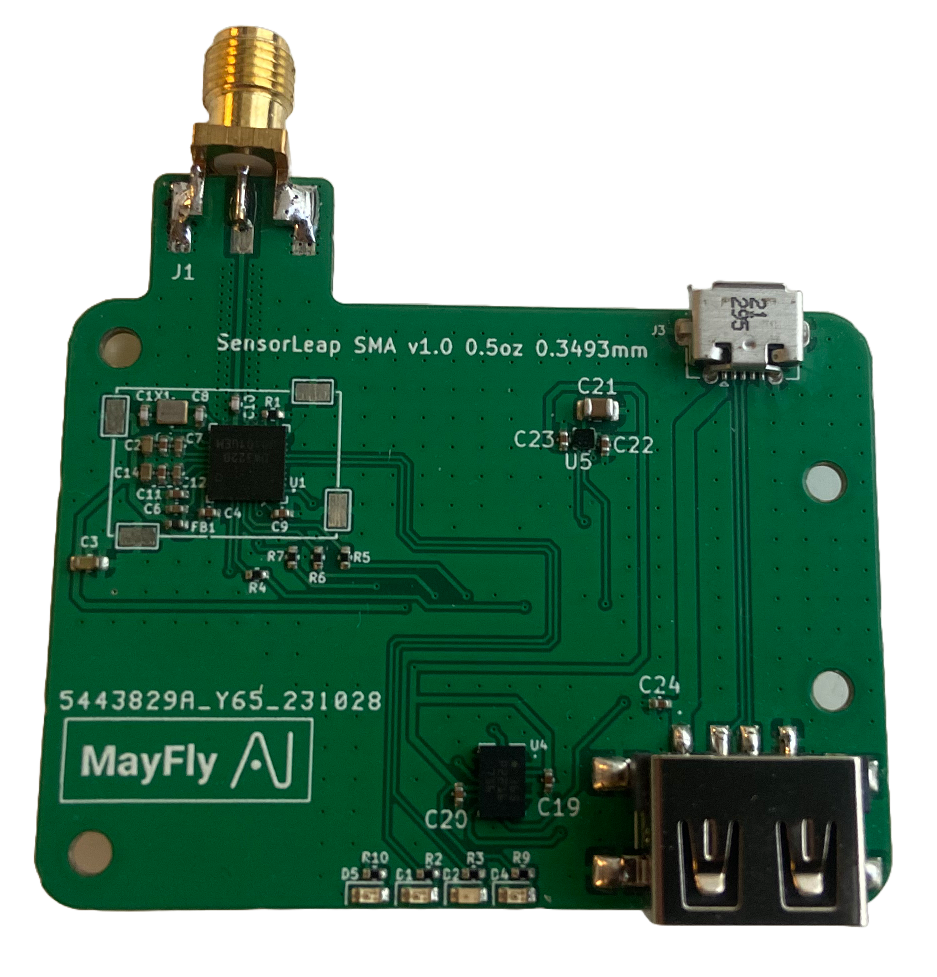
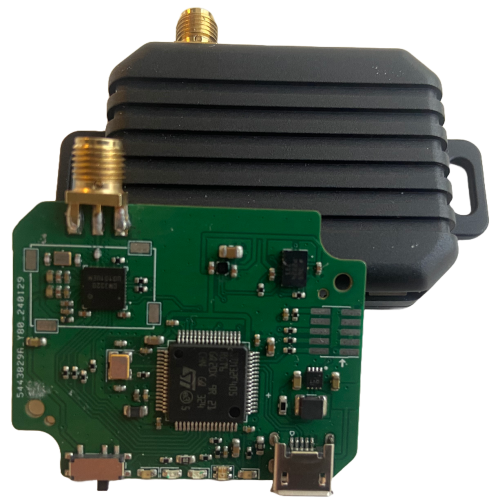
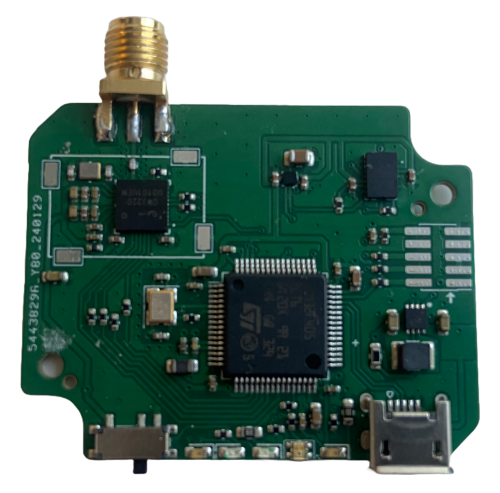
– Two versions available: STM32 standalone or Raspberry Pi HAT
– Build it yourself or let us do it for you.
*raw unfiltered trilateration of UWB data.
– Sensor driver code (UWB, IMU and Magnetometer) runs on the Raspberry Pi.
– This Pi HAT is also used to assemble our wireless pose camera for sensor fusion of: UWB, RGB, ToF 3D depth, IMU and magnetometer.
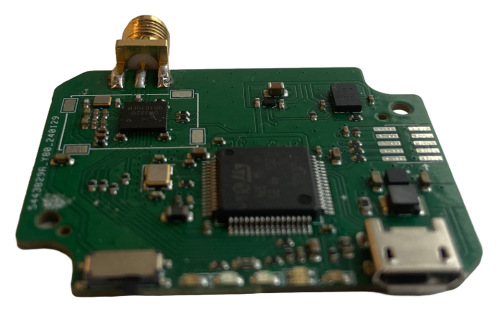
– Sensor driver code (UWB, IMU and Magnetometer) runs on the STM32.
– Interface over USB with any host computer (Linux, Windows, Mac).
– The STM32 standalone version is also designed to be used as low-cost UWB basestations.
No closed source firmware. Both application code (Python/C++) and the on-sensor code (C++) is open source on our GitHub page.Everything you need to build or modify the pose sensor can be found on our GitHub page. This includes schematics and KiCad files.
The Pose sensor is a low power, low compute, low weight solution for real time absolute positioning and orientation.
The application code for position and orientation estimation can run on small edge computers.
The STM32 standalone version runs at 5V and 0.055A when used as a tag.
For the STM32 standalone version, the application code can be easily installed (pip install) on all common platforms.